



新闻动态

- 地址: 江苏省苏州市苏州工业园区若水路398号
- 邮箱: tzhang2009@sinano.ac.cn
- 电话: 86-512-62872706
- 传真: 0512-62603079
- 网址: http://nanosensor.sinano.ac.cn

祝贺课题组博士生孙富钦“Flexible Artificial Sensory Systems Based on Neuromorphic Devices”综述文章被ACS Nano接收
人工智能技术的发展为智能仿生感知系统的发展带来了革命性变化,同时也对器件和系统的高效信息处理能力以及舒适性、兼容性等提出了迫切的要求。基于柔性神经拟态器件的柔性仿生感知系统能够以较低的功耗处理大量的信息,同时具有良好的曲面共形特征,在可穿戴设备、人机交互、智能机器人、医疗监测及运动康复等战略新兴领域具有广阔的应用前景。柔性人工突触器件作为系统中的关键器件,由于其特殊的处理器/存储器配置结构,以及高效率并行处理大量非标准化数据的能力,近年来吸引了国内外众多研究者的关注。
我课题组团队围绕柔性智能感知领域,对面向智能仿生感知系统的柔性感知器件和柔性人工突触器件方面进行了探索,并取得了系列研究成果(Adv. Mater., 2014, 26, 1336; Adv. Mater., 2015, 27, 1370; Small, 2017, 1602790; Adv. Sci., 2018, 5, 1800558; Small, 2018, 14, 1703902; Adv. Mater. Technol., 2020, 5, 1900888; npj Flex. Electron., 2020, 4, 3; Microsyst. Nanoeng., 2020, 6, 84; Research, 2020, 8910692; Adv. Electron. Mater, 2020, 6, 2000306.)。
与典型的机电感知系统不同,生物的感觉器官能够对外界信息进行检测和处理,并将处理过的信号传递给大脑进行最后的信息判断,其能量消耗仅为几个fJ/spike量级。生物感知系统具有这些优势,神经突触在其中起着至关重要的作用,通过调节突触的权重来实现信号处理以及学习遗忘记忆等功能,是生物实现感知-信息处理的基础。因此,在柔性器件中实现突触行为,研究柔性神经形态电子学并将其应用于新型仿生神经形态感知系统,在硬件层面上模拟生物大脑和感知系统功能,有望实现与生物神经信号的兼容,构建智能、高效的智能感知系统和人机交互界面。
近期研究团队在ACS Nano上撰写了综述文章,针对最近几年国内外相关团队在基于人工突触器件的仿生感知系统领域的研究工作进行了总结分析,首先是对基于不同材料和结构的仿生人工突触器件进行了总结和归纳,根据器件的不同结构、工作机制将其分类,对每一类器件中常用的材料及其工作原理进行概述,分析了不同类型器件的优缺点以及应用场景;重点对基于人工突触器件的仿生感知系统进行了论述,对包括触觉、视觉、嗅觉、味觉、痛觉以及感觉运动系统等进行了详细的整理和探讨;最后对基于人工突触器件的智能仿生感知系统面临的问题、挑战进行了讨论,对该领域的未来发展方向进行了展望。
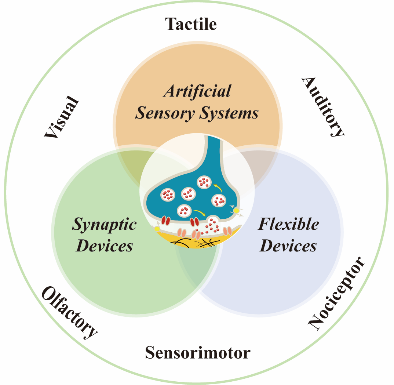
图:基于人工突触器件的柔性仿生感知系统
该论文以“Flexible Artificial Sensory Systems Based on Neuromorphic Devices”为题,发表在ACS Nano(2021, 15(3): 3875-3899)上。论文的第一作者是中科院苏州纳米所博士研究生孙富钦,通讯作者为张珽研究员,共同作者包括陆骐峰博士和冯思敏副研究员。上述工作得到了科技部重点研发计划、国家自然科学基金、江苏省杰出青年基金、中科院脑科学与智能技术卓越中心等支持。
原文链接:http://www.sinano.cas.cn/news/kyjz/202104/t20210415_5993173.html